BLOG
ブログ
ブログ
- 子供・小学生・中学生向けプログラミング教室「スタープログラミングスクール」
- ブログ
- イオン市川妙典教室
- アームロボの制御に挑戦
2016.12.09 / Friday
アームロボの制御に挑戦
教室の様子を覗いてみよう
イオン市川妙典教室
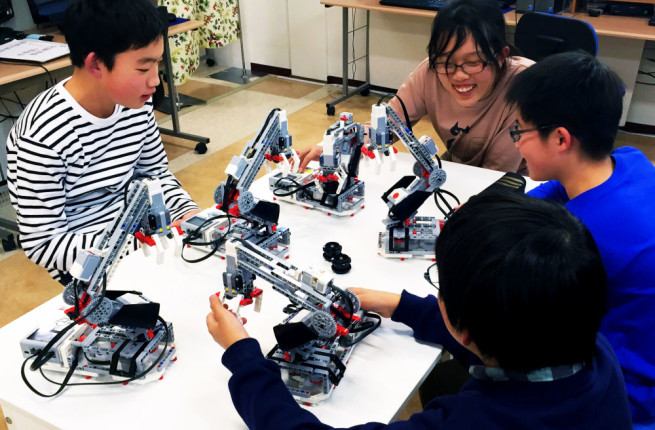
ロボット第32回の課題は、アームロボットを使って自動でバケツリレーをすること。
アームロボットを横一列にならべて、アームの移動とブロック(テーブルの真ん中に置かれている丸い黒いブロック)をつかむ操作を自動で行うようにプログラミングして、順々にお隣の人へ渡していきます。
写真は、UFOキャッチャーのようにインテリジェントブロックの上下左右のボタンを利用して、手動でお隣の人へバケツリレーをした時の様子です。
3つのモーターと2つのタッチセンサーを上手に使いこなしたプログラムを4人共作ることができました!
次回は、自動のバケツリレーのプログラムを完成させます!みんなで上手に運べるかとっても楽しみです(^^)
- 次の記事へ >
- 2016.12.09/Friday アームロボの制御に挑戦
| < 前月へ | 2026年6月 | |||||
| S | M | T | W | T | F | S |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 | ||||
- 教室の様子を覗いてみよう
- みんなで発表会!
- わくわく体験イベント
- ジュニア・プログラミング検定
- タイピング
- 保護者・受講生の声
- AI・情報を学ぼう!
- おすすめのPC講座
- みんなの作品を紹介!
- プログラミング教育のいま
- SPS便り
教室ごとに見る
- スタープログラミングスクール運営本部 (106)
- 【東京都のプログラミングスクール】 (544)
- 【神奈川県のプログラミングスクール】 (555)
- 【千葉県のプログラミングスクール】 (343)
- 【埼玉県のプログラミングスクール】 (295)
- 【茨城県のプログラミングスクール】 (28)
- 【静岡県のプログラミングスクール】 (55)
- 【愛知県のプログラミングスクール】 (122)
- 【滋賀県のプログラミングスクール】 (39)
- 【京都府のプログラミングスクール】 (169)
- 【大阪府のプログラミングスクール】 (364)
- 【兵庫県のプログラミングスクール】 (177)
- 【奈良県のプログラミングスクール】 (102)
- 【福岡県のプログラミングスクール】 (61)
- 【その他のプログラミングスクール】 (10)

